在线会议
在线会议 论坛
论坛 专题
专题 工控直播
工控直播 新闻中心
新闻中心 子站
子站 技术
技术 社区
社区

The smallest controller gain that can cause such an oscillation is called the ultimate gainPU. The period of those sinusoidal oscillations is called the ulti
P=0.6·P u
T I="0".5·T u
T D="0".125·T u
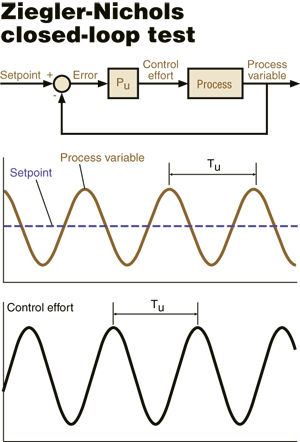
Forcing the closed loop system into sustained oscillations with a proportional-only controller reveals the process's ultimate gain PU and ultimate period TU. UnfortunatelyCONTROL ENGINEERING China版权所有, doing so can also cause dramatic and sometimes dangerous swings in the control effort and the process variable
Caveats
But even the Ziegler-Nichols methods aren't so straightforward in actual practice. Different PID controllers use different versions of the PID formula控制工程网版权所有, and each must be tuned according to a different set of tuning rules. The rules also change when:
•The controller is not equipped with integral and/or derivative terms;
•The process itself is inherently oscillatory;
•The process behaves as if it contains its own integral term (as with level control); and/or
•The process deadtime is very small or significantly larger than the process t
 2025 Raythink燧石红外热像仪有奖试用
2025 Raythink燧石红外热像仪有奖试用.jpg) 立即获取Fluke在线红外热像仪解决方案白皮书
立即获取Fluke在线红外热像仪解决方案白皮书 2025电子及半导体智能制造创新高峰论坛
2025电子及半导体智能制造创新高峰论坛.jpg) 电机与变频驱动故障排除白皮书免费下载
电机与变频驱动故障排除白皮书免费下载.jpg) 每个联接都经得起时间考验-Moxa有奖调查
每个联接都经得起时间考验-Moxa有奖调查