
 在线会议
在线会议 论坛
论坛 专题
专题 工控直播
工控直播 新闻中心
新闻中心 子站
子站 技术
技术 社区
社区


由于不确定性,所有这些问题可能会变得更加严重。有时,控制器对其所控制的过程缺少足够的信息,因此无法判断过程所需要控制的强度和持续时间。而有时候,控制器甚至无法判断其是否表现良好www.cechina.cn,以及当由于传感器更换、传感技术的物理限制或者测量噪声导致过程参数无法测量的时候如何改进控制性能。
测量噪声对于PID控制器的微分环节来讲,尤其是个麻烦。为了计算下一个控制活动的“微分”部分,控制器先计算出最新的偏差变化(设定值和过程变量之间的差值),然后再乘以微分增益或额定参数。
由于随机电磁干扰或者传感器输出部分的其它原因,导致控制器过程变量的波动,就会造成控制器微分环节不必要的增加或降低。如果噪声非常严重,或微分增益非常大,则控制器紧随其后的控制活动可能不仅是不必要的,而且可能会对执行器、甚至是对受控过程本身造成损害。
过程参数滤波
解决这一问题最简单的方法,就是在测量比较大的噪声时,降低微分增益,但是这么做会降低其效果。有时候,测量噪声可以通过修复传感器或通过数学方法对过程变量的测量进行滤波。过程变量滤波本质上就是对传感器最近的输出进行平均,以更好的估计过程变量实际值。
然而, 过程变量滤波有其自身的局限性。只有在真正随机的测量噪声——即在等测法测量中,传感器的输出有时因之而增加,有时因之而降低,才能起作用。如果这些正向和反向波动出现的频率均等,滤波器的平均运算能够消除这些波动。但是,如果测量噪声在一个方向或另外一个方向持续影响传感器的输出,那么经滤波处理的过程变量会保持偏高或偏低,因此会导致控制出力过大或不足。
过程变量滤波器还可延缓控制器的响应时间。如果滤波器的组态是在较长时间内,对传感器输出进行平均,那么在消除随机波动方面会有良好的表现,但同样也会错失在实际过程变量中发生的最新变化。在将最新的过程变量值报告给控制器之前,滤波器需要感知传感器输出的稳定变化。不过有时,控制器甚至都无法感知过程变量的瞬时变化控制工程网版权所有,更遑论对其进行快速响应了。
作为一种折衷,在计算比例、积分和微分控制活动时,有些PID控制器可设置不同的滤波参数。由于在微分环节,测量噪声造成的问题最为严重,因此微分环节需要最强的滤波。为了保持对过程变量瞬时变化的快速响应,比例环节从滤波中获得的收益较少(也就是说,滤波器采用较短的传感器输出序列)。由于积分环节本身就是一个滤波器,因此该环节根本不需要过程变量滤波。
而且,可将滤波器应用于控制活动而不是过程变量。这么做意味着允许测量噪声进入到PID(尤其是“微分”环节中)计算中,但是在进入到执行器之前,滤波器所具有的噪声抑制功能,已经对控制结果进行了优化。滤波器还有助于降低控制速度,避免当过程对执行器运转过于敏感时,导致过程发生较大的波动。
在另一方面,由于控制活动叠加了滤波,因此导致过程看起来比实际上要慢。当操作人员需要更快的闭环性能时,也许会倾向于重新调节控制器以获得更好的性能,但他没有意识到问题出在滤波器的抑制作用,而不是因为过程本身。当不同的操作人员对控制器和滤波器进行整定时,如果只调整一个而没有检查另外一个,有时会造成两者不必要的相互干扰。
死区
忽略传感器输出的微小变化,也可降低测量噪声的影响,因为可以假定这些微小的变化只是由于测量噪声所造成的波动,并且在任何情况下都不会对控制器的控制决策造成影响。只要过程变量和设定值之间的偏差维持在设定的死区(deadband)范围内,控制器就不会动作。
技巧在于确定:偏差变化多少才算是足够小,才可以忽略不计。如果死区设定过大控制工程网版权所有,可能会错过过程中较大的变化。但是如果设定过小,则会导致控制器不必要的频繁响应传感器输出的每个微小变化,即使这时过程变量已经达到设定值。
如果操作员想将过程转移至更高或更低的运行区间,但是该区间落在死区范围内,该操作所引起的偏差会被忽略,控制器不会有任何动作。如果死区设置过大,控制器的控制精度就会受到影响。也就是说,这可能会造成制冷区域的温度比设定温度低五度,而不仅仅是一度。
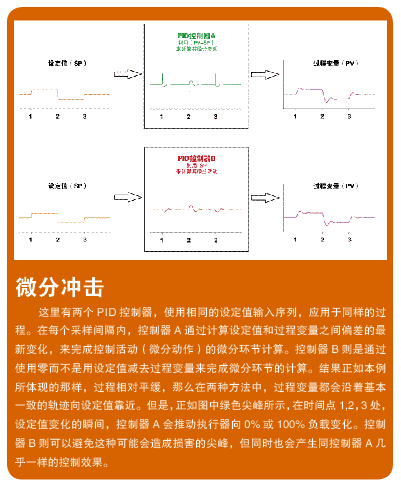
抑制微分冲击
另一方面,在有些场合,有意识的忽略设定值的变化www.cechina.cn,可使PID控制的性能获得提升。同样的,控制器的微分环节在其中也扮演着关键角色。

但是在实际应用中,过度调节往往要弊大于利,比如,房间温度控制所需要的就是过程变量缓慢、平稳的变化。温度控制器的每次调节,如果导致大量的热空气进入房间,不但会使人员感觉不舒服,而且对房间内的家具也不好。
在此种情况下,不使用微分环节,或者是使用负过程变量而不是直接使用过程变量和设定值的偏差比较有利。如果设定值是常量,两种计算结果相同。如果设定值呈阶梯式变化,两种计算也是一样的,除了在每步变化发生的瞬间。但是由于在微分环节的计算过程中,使用了负向的过程变量微分,消除了偏差微分所带来的急剧变化。
在控制活动中,同样可以像过程参数一样,对设定值使用滤波功能,可以缓和由设定值变化所导致的尖峰。但是, 对于那些操作趋势的变化比较缓慢的场合,设定值滤波的效果不是特别明显。使用滤波时,设定值的阶梯式变化,对于控制器来讲是一种平缓的变化,因此消除偏差的突变反而会导致控制活动中的尖峰。
设定值滤波在串级控制应用中同样有效。对内环的设定值使用滤波,也会对外环的控制活动产生滤波作用,同样会带来上述好处。
 2026具身智能机器人电子制造应用研讨会
2026具身智能机器人电子制造应用研讨会.jpg) 福禄克六大“法宝”帮您搞定过程仪表校准难题
福禄克六大“法宝”帮您搞定过程仪表校准难题 中控时间序列大模型TPT免费有奖体验
中控时间序列大模型TPT免费有奖体验 爱德克SE2L进阶版安全激光扫描仪有奖预约演示
爱德克SE2L进阶版安全激光扫描仪有奖预约演示 剑维软件电子半导体行业白皮书有奖下载
剑维软件电子半导体行业白皮书有奖下载

































