在线会议
在线会议 论坛
论坛 专题
专题 工控直播
工控直播 新闻中心
新闻中心 子站
子站 技术
技术 社区
社区

Vecna 公司在Bear 的移动关节上安装了21 个Microchip 公司的PIC 微控制器
为了实现这一点,西奥博尔德和机器人产品经理——杰米妮可(Jamie Nicole)合作开发了能够让“Bear”感知其臂、躯干和腿的传感器。一个由SpaceAge控制公司研制的躯干惯性测试装置可以探测机器人的姿势,由美国Digital公司提供的光学接合
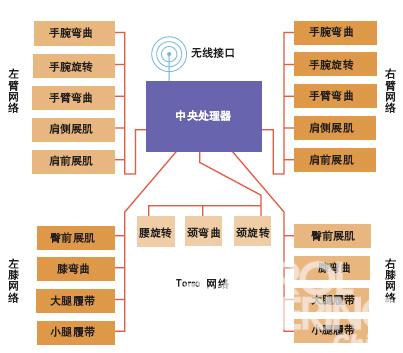
译码器跟踪机器人身体各部分的角位移。然后译码器会将探测到的信号发送到由Microchip微芯科技公司提供的21 PIC微处理器上,它与机器人的关节是一体的。关节微控制器被隔离为5块:左臂;右臂;左腿;右腿;及躯干。

Vecna的设计团队在此项目中最多有12人同时参与设计,图片从左至右是:Jamie Nichol博士,机器人产品经理控制工程网版权所有,Jonathon Klein,工业设计总监,Scott Kullberg,资深软件工程师,Josh Ornstein,机器人学家,半跪的是发明人Daniel Theobald。
“我们想让它的每个关节都很灵活,这
降低网络事故的发生频率很重要,Vecna公司的设计师们说,因为机器人内部由一台计算机处理最困难最复杂的工作。这个基于Linux的中央处理器——由Via科技公司生产的EPIA-M母板,进行更加周密的运算www.cechina.cn,包括根据客户指定设计的平衡算法和高级协调程序。根据这些程序做出的指令,中央处理器(CPU)会将信号发送给节点上的微控制器www.cechina.cn,然后由微控制器与发电机、阀门以及其他给机器人提供能量的调节器进行“交流”。
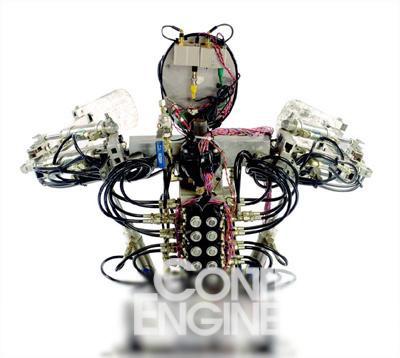
从后面看Bear 的液压驱动上半身,包括1500psi气缸和独立导向的液压蓄能器,它们用在每个关节上的PIC 微控制器控制
“Bear”的腿或轮子也从位于膝盖和臀部的微控制器上获取指令CONTROL ENGINEERING China版权所有,早期版本的“Bear”利用轮子移动,现在的机器人模型则采用四个由发电机驱动的履带完成移动。位于膝盖上下的履带由MagMotor公司生产的2 HP刷型永久磁铁驱动,通过一个变速箱调节速度。本质上,履带构成了机器人的腿,使它能够直立、行走、爬楼梯或跨过障碍物。你可以在YouTube视频网站上看到更多处于运动状态“Bear”的视频。
“我们为机器人设计了两条安装了履带的独立的腿,所以它能够在爬楼梯的时候保持与每阶楼梯顶部绝对的接触”,西奥博尔德说。这样一来,在攀登或走下楼梯时,这个厚重结实的机器人不会对楼梯造成破坏。他说,“很显然,当你抱着一个人的时候,当然要尽量减少不必要的冒险。”

早期的设计模型将轮子和履带相结合来爬楼梯。
下一个挑战:自治
因为上述原因,美国陆军的工程师们表示他们对“Bear”的人性化结构设计感到满意。
“许多人说,‘你们不需要那样控制工程网版权所有,’”美国陆军的吉尔伯特说,“他们告诉我们,‘只需使用四个轮子或升降机’。但事实证明这些结构不适用于爬楼梯,他们不能灵活的突然转弯,而且他们不够柔和。”
吉尔伯特补充说,军队同时希望能够赋予未来的“Bear”型机器人自治的智能。他说,目前,“Bear”仍然是通过远程控制进行操作。但是军队的工程师们希望最终可以使用激光、雷达和声纳型传感器让机器人具备感知、理解和应对周遭环境的能力。
Vecna 公司的设计者们利用美国Digital 公司生产的光学译码器(如图)和一个内部测试装置探测机器人的姿态和运动。

采用液压臂,机器人可以提起400 磅的重物。可以在YouTube视频网站上看到更多的视频。

“机器人仍处于幼年时期,”吉尔伯特说,“自治仍是最大的挑战。”
但是,现在“Bear”的设计师们已经成功的实现了该项目的头两个目标:理论验证和爬楼梯能力。它能够依靠履带型接合式的腿站立、奔跑。还有一系列目标需要在不远的将来实现:对预料之外障碍物做出反应;沿山坡一侧跑下来;感知周围环境。
“该项目的最终目标是实现机器人自治,”吉尔伯特说,“实现这个目标的唯一途径就是实践,而且我们已经开始在做了。”
.jpg) 每个联接都经得起时间考验-Moxa有奖调查
每个联接都经得起时间考验-Moxa有奖调查.jpg) AVEVA InTouch Unlimited试用版下载
AVEVA InTouch Unlimited试用版下载 福禄克三大“法宝”帮您搞定过程仪表校准难题
福禄克三大“法宝”帮您搞定过程仪表校准难题 2024年度最佳产品奖颁奖典礼会后报道
2024年度最佳产品奖颁奖典礼会后报道 2024全球自动化和制造主题峰会会后报道
2024全球自动化和制造主题峰会会后报道